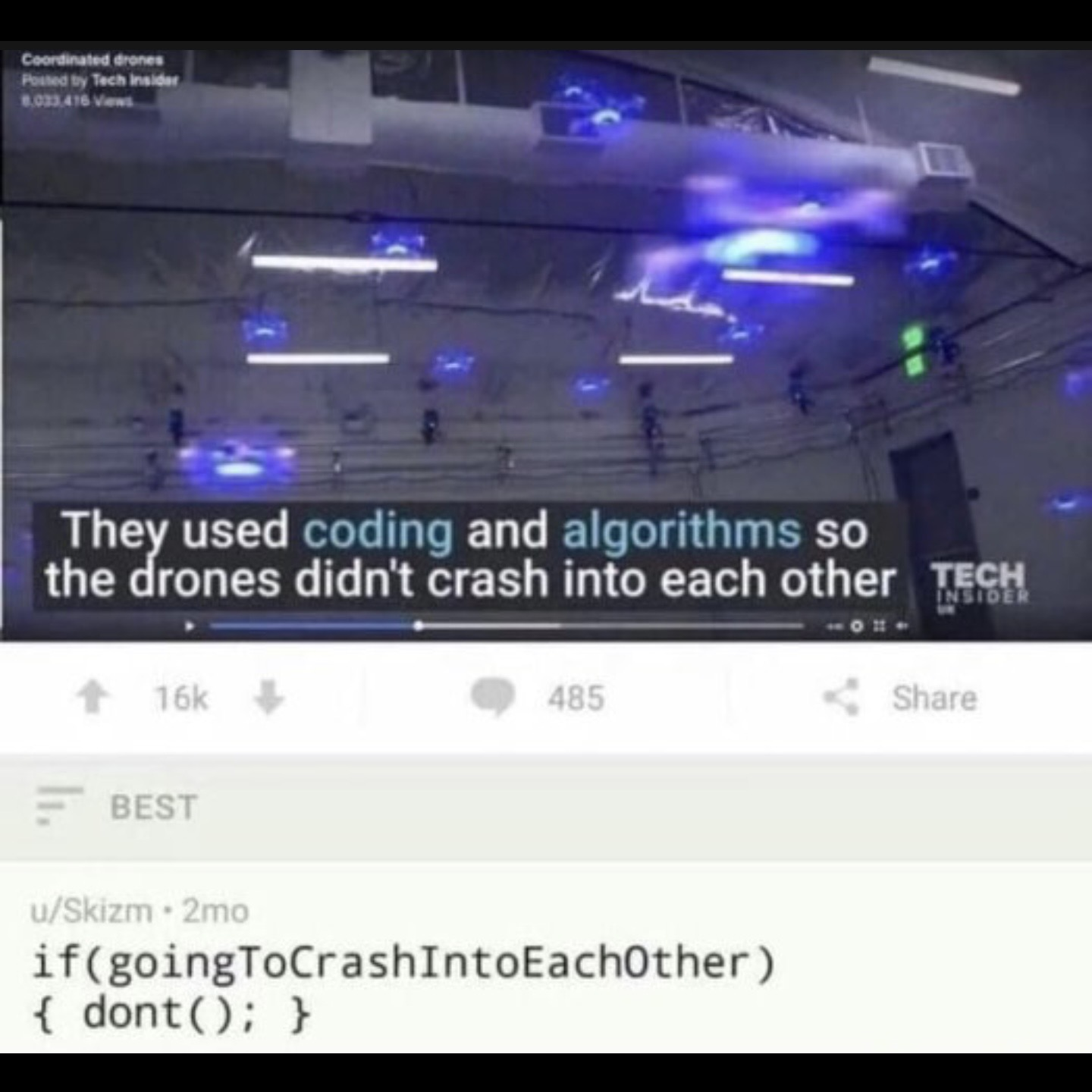
Well I think goingToCrashIntoEachOther needs to return another drone object. Then don’t can take that object. Based on self.serialNo and other.serialNo a mutually beneficial avoiding manoeuvre could be executed.
If you’re about to crash into more than one other drone… Good luck the function specifies “EachOther” meaning just one other drone!
{kind=link}
Well I think goingToCrashIntoEachOther needs to return another drone object. Then don’t can take that object. Based on self.serialNo and other.serialNo a mutually beneficial avoiding manoeuvre could be executed.
If you’re about to crash into more than one other drone… Good luck the function specifies “EachOther” meaning just one other drone!
this calls for a whiteboard